Hinderniserkennung am Kletterroboter
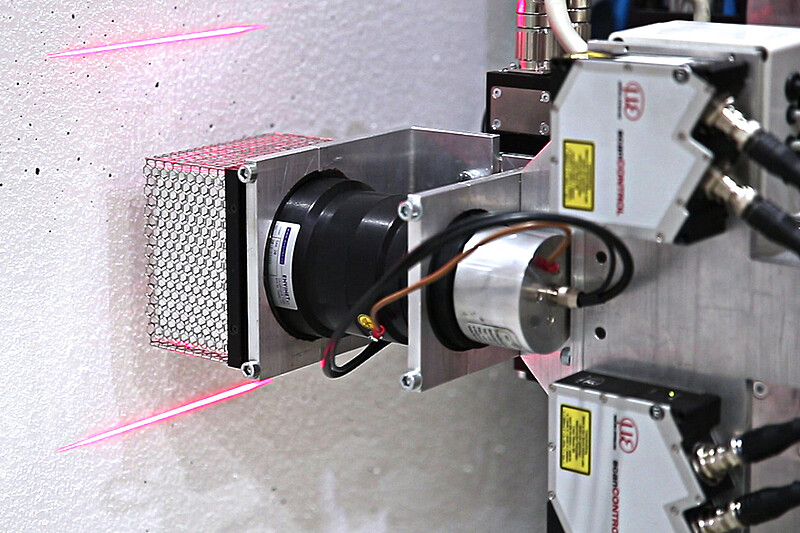
Die verwendeten Sensoren der Serie scanCONTROL 2600 bilden je nach Kletterrichtung eine Barriere über- bzw. unterhalb des Detektors. Aufgrund der Detektorgröße ist ein entsprechend großer Messbereich von 100 mm in X- und in Z-Richtung erforderlich. Die Sensoren werden direkt am Roboterarm nahe des Detektors platziert. Dies ermöglichen das kompakte Sensorgehäuse sowie das geringe Gewicht von lediglich 380 Gramm. Zudem zeigen sich die Laser-Profil-Scanner von Micro-Epsilon widerstandsfähig gegenüber den wechselnden Umweltbedingungen, denen der Kletterroboter im Außeneinsatz ausgesetzt ist.
Das Messsystem zeigt sich nahezu unempfindlich gegenüber abfallendem Staub und Schmutz beim Abtragen des Mauerwerks sowie gegenüber Wasser, Feuchtigkeit, Vibrationen und Schocks. Eine manuelle Laserabschaltung sorgt für zusätzliche Sicherheit beim Umgang mit dem Roboter. Ab einer Breite von 156 µm und einer Höhe von 12 µm werden Hindernisse gemessen. Die unterschiedlichen Materialien und Oberflächeneigenschaften der Fassaden nehmen dabei keinen Einfluss auf das Messergebnis.